高端裝備制造
陸空兩棲機器人
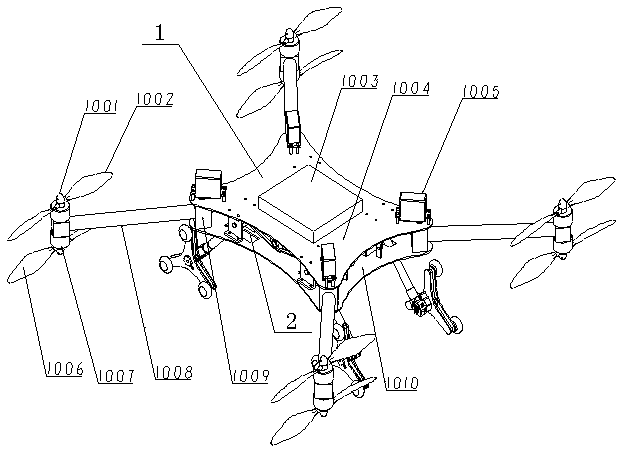
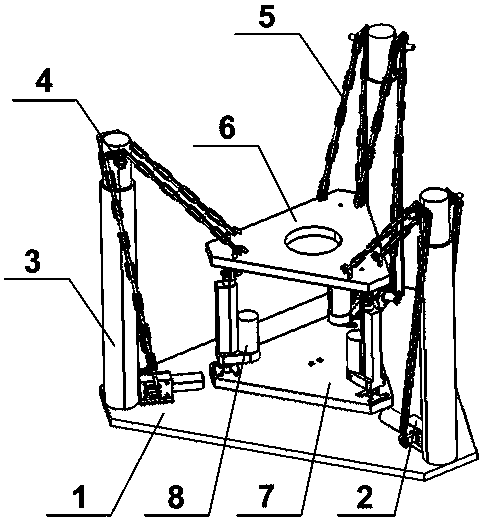
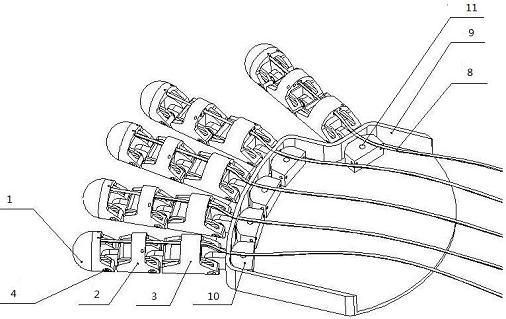
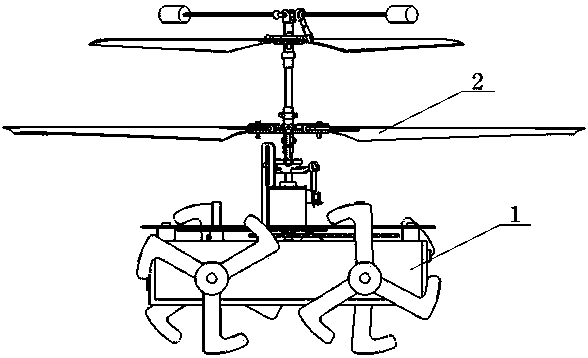
本發(fā)明涉及一種陸空兩棲機器人,屬于一種仿生外型的陸空兩棲機器人裝置��。陸行裝置與飛行裝置固定連接。本發(fā)明的有益效果是����,具有很強的越障能力和通過能力���,與此同時兼顧其飛行能力�����,主要包括:1��、平臺設計仿生化:便于保證該機器人在執(zhí)行任務時的隱蔽性�����。不僅要整體機械設計體積小����,而且外觀要做仿生性偽裝����。2、采用仿生結構的不完全輪結構�����,在很小的重量和采用同樣尺寸的條件下達到了高于輪式、履帶式結構的通過能力��。3���、簡化自動傾斜器和共軸雙槳方式機械結構簡捷緊湊���、體積小、重量輕��、控制簡單���。
長春工業(yè)大學
授權發(fā)明