高端裝備制造
一種激光導引AGV的動態(tài)避障控制方法
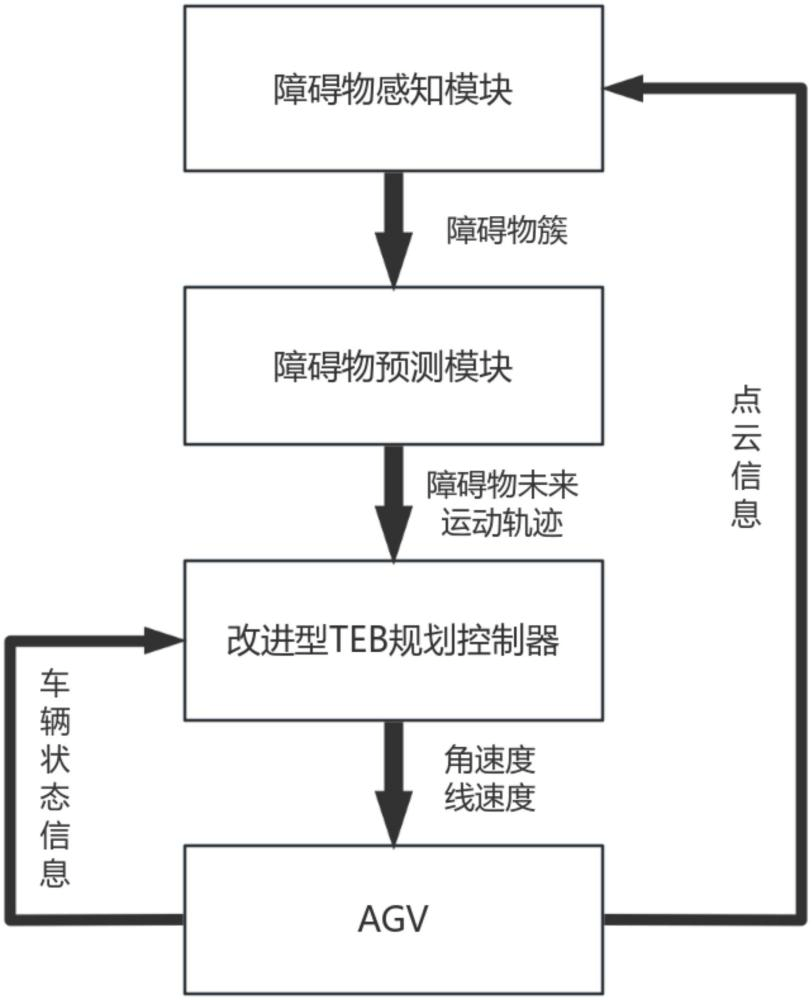
一種激光導引AGV的動態(tài)避障控制方法,旨在提升AGV對移動障礙物的避障能力�����。本發(fā)明涉及自動駕駛領域����。該方法包括障礙物感知模塊、障礙物預測模塊和改進型TEB規(guī)劃控制器和AGV�;其中,AGV上的激光雷達傳感器將點云信息輸入至障礙物感知模塊進行聚類處理�����,生成障礙物簇信息��;障礙物預測模塊接收障礙物簇信息并預測障礙物未來運動軌跡��;改進型TEB規(guī)劃控制器綜合障礙物未來運動軌跡和車輛狀態(tài)信息����,通過多目標優(yōu)化求解輸出角速度和線速度�����,控制AGV執(zhí)行避障動作,進而提升AGV的動態(tài)避障性能�����。
長春工業(yè)大學
授權發(fā)明